3D打印机轴:基础知识简单解释
魔猴君 知识堂 142天前
虽然笛卡尔坐标并不总是被使用,但每台FDM 3D打印机都需要某种方法来描述空间中的位置,以便定位和确定喷嘴的位置。同时,为了实现这一目标,不同类型的机器使用不同的机械运动系统来操纵热端和沉积融化的长丝。逐层沉积过程高度依赖于轴的运动,这对打印质量和速度有直接影响。
通常情况下,横向运动(即左、右、前、后)通常分配给X轴和Y轴,而Z轴则对应于垂直运动。根据这一惯例,每一层都在XY平面内沉积,而Z轴运动则负责利用3D切片机中预先设定的高度在层与层之间推进。
在本文中,我们将介绍FDM3D打印运动的几个方面,特别是与不同运动学系统和沿轴运动有关的方面。首先,我们将回顾不同类型的3D打印机及其工作原理。
3D打印机的类型
FDM3D成型机可以采用多种配置来实现喷嘴相对于构建平台的3D运动。然而,由于没有官方的分类系统,在讨论各种打印机样式时可能会产生混淆。
一、直线型
直线型打印机是最常见的FDM打印机,包括许多通用和特定的机器子类型。"直线"指的是沿每个轴的运动(大部分)都是独立的线性运动,这通常会导致打印机设计成方形或盒形。
遗憾的是,直角打印机往往容易引起混淆。这是因为多年来出现了许多名称和标签,其中一些具有多重含义,另一些则含义重叠。例如,造成混淆的主要原因之一是"笛卡尔"一词,它通常不是用来区分极坐标打印机,而是用来泛指直角坐标打印机,以代替更具体的子类型名称(如XZ打印头)。这可能会产生误导,因此最好避免将机器标为"笛卡尔打印机",因为绝大多数打印机都使用笛卡尔坐标(包括不是直角坐标的delta和SCARA打印机)。
有鉴于此,以下三节将讨论各种类型的直角坐标打印机,首先讨论一些通用类型--XZ打印头、XY打印头和交叉式--然后再讨论一些更具体的类型--CoreXY、H-bot和皮带式。
1、XZ头、XY头和交叉

Prusa打印机采用XZ头运动系统(来源:Prusa Research)
大多数直线打印机都是XZ打印头、XY打印头或交叉式打印机,这些标签指的是不同的龙门架配置。
这些打印机的移动部件可能非常重,这意味着在高速运转时突然改变方向可能会造成问题。这个问题与打印机的抖动设置有关,可能导致沉积不准确,甚至打印失败。
尽管如此,这些3D打印机拥有最简单的运动系统,通常用于DIY 3D打印机项目。请注意,悬臂式打印机(如Prusa Mini+和Ender 2 Pro)本质上是框架不同的XZ头打印机。
2、CoreXY&H-Bot

CoreXY打印机利用相当复杂的同步带组件进行横向移动(来源:ReP_AL Maker Shop)
CoreXY 3D打印机使用一种相当特殊的运动机制。其XY横向运动由两个电机和两条长定时皮带驱动,是一个相当复杂的动态系统。垂直运动(Z轴)完全由构建板向下执行。
虽然这些3D打印机与其他打印机相比具有众多优势,但最重要的可能是它们能够以更高的速度进行打印。CoreXY型打印机的活动部件更少、更轻,因此热端移动速度更快,打印速度也更快。这是因为负责XY运动的电机是固定的,并连接到打印机的机架上,从而大大减少了振动。
然而,过于依赖长同步带可能会造成问题,因为必须始终对齐和张紧同步带。皮带张力过低会导致运动不准确,而皮带张力过高则会增加磨损。劣质皮带也是此类打印机出现问题的主要原因。
H-bot3D打印成型机在风格上非常相似,经常与CoreXY混为一谈,但它们在皮带的配置方式上有所不同。CoreXY使用两条同步带,而H-bot打印机只使用一条,因此在振动和扭矩方面存在一些差异。由于这一条皮带的张力非常重要,因此需要不断调整。此外,皮带的特定配置已被证明会在打印头运动中产生非理想的拉锯战式扭曲。由于这些原因,H型机器人自问世以来,受欢迎程度有所下降。
3、带式3D打印机

带式3D打印机以传送带的形式展示“无限”Z轴(来源:Polar)
带式3D打印机是FDM 3D打印领域最近出现的一种非常独特的新技术。皮带"指的是构建平台是一条传送带。这可能是这些机器的主要卖点,因为它允许用户创建很长的部件或重复生产部件,而无需停止打印机(理论上)。
在大多数情况下,带式3D打印机都是CoreXY或XY头打印机,其机架相对于(带式)构建平台是倾斜的,这意味着坐标系实际上是倾斜的。因此,带式打印机被称为"无限"Z轴。这样做的后果是降低了整体打印速度,并且打印可能需要额外的支撑结构(如上图中红色的3D Benchys)。
由于缺乏打印床加热功能,这些打印机在使用材料方面也受到限制;ABS等材料可能会出现严重的打印床附着问题。
4、三角洲3D打印机
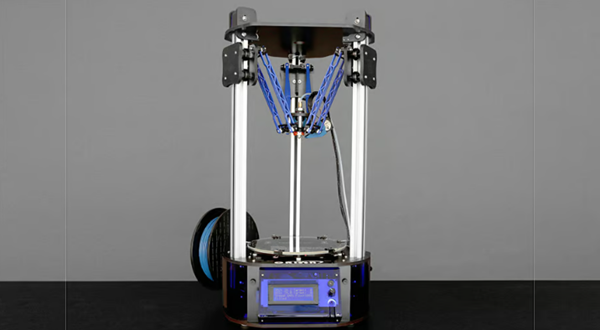
与直线打印机相比,Delta打印机的运动学并不直观(来源:Adafruit)
从直线型打印机发展而来的三角洲3D打印机采用了一种相当独特的运动机制,在业内被称为"三角洲机器人"。这些机器的热端连接到三个移动臂上,每个移动臂都连接到自己的垂直导轨上。由于所有热端运动都是由所有三个臂同时执行的,因此没有任何一个臂与任何单独的轴相对应。
虽然三角式打印机仍被视为笛卡尔式打印机,但其运动学原理与直角式打印机相比并不直观。三角式打印机的运动特性使其可以进行非常快速和精确的操作,因为打印头比直线式机器要轻得多。这减少了喷头运动的惯性,使运动速度更快,振动更小。
Delta打印机具有完全固定的圆形构建板,在打印圆形模型时效果很好。此外,其独特的设计有利于提高高度,通常用于打印较高的物体。同时,较小的XY尺寸也会造成限制。由于其复杂性较高,校准和故障排除也较为困难。
5、SCARA 3D打印机
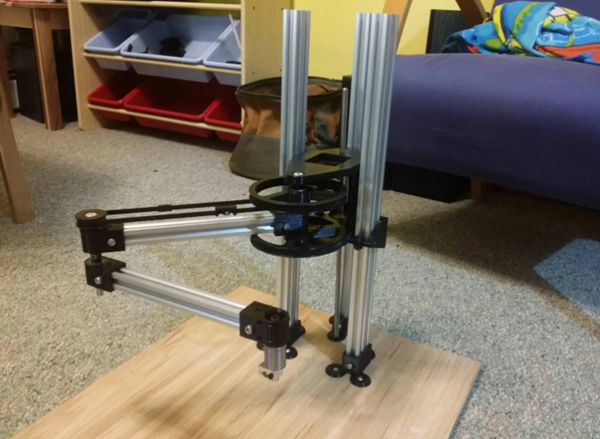
SCARA工作正在进行中(来源:k0all,来自Reddit)
SCARA是"选择性顺应铰接机械臂"的缩写。顾名思义,它使用机械臂执行XY运动,而垂直(Z轴)运动通常完全由构建板完成。
两个机械臂均由两个单独的电机驱动,它们的耦合运动可实现热端在XY平面内的定位。适当的机械联动系统可使耦合机械臂到达整个构建台。Z运动通常由单个步进电机完成。
这些打印机速度很快,但需要高质量的活动关节才能正常工作。由于其独特的配置,SCARA3D成型机占用的空间也比直线型机器小。
不过,SCARA可能是市场上最罕见的3D打印机配置。这意味着要找到备用和升级部件以及适当的社区支持可能非常困难。
二、直线运动系统
现在我们知道,无论打印机的类型如何,线性运动系统都是3D打印机最关键的机构之一。虽然热端是在3D空间内移动的,但所有运动都可以分解为沿三个轴的线性运动。
在3D打印机中,驱动这种线性运动的最常见方式是使用电机。这些电机首先将电能转化为旋转运动,然后使用各种机构将旋转运动转化为线性运动。现在让我们来看看三个关键机构及其组件,以便更好地了解3D打印机轴所涉及的线性运动。
1、步进电机

步进电机按标准尺寸分类,表明其面板直径(来源:Mikroe)
步进电机是迄今为止3D打印领域使用最多的驱动电机。这些无刷交流电机以增量(步)为单位旋转,即使没有位置传感器反馈,也能精确控制其旋转。由于步进电机不是非常复杂的机械装置,因此价格相对便宜。
步进电机根据其规格进行识别,其术语由美国国家电气制造商协会(NEMA)标准化。最常用于3D打印的电机都以该美国协会的名称命名,通常称为"NEMA",后面的数字表示其面板的尺寸。例如,常用的NEMA 17的面板直径为1.7英寸(约43.18毫米)。
对于3D打印来说,步进电机的标准扭矩范围为40至45牛米,这已经足够。这些电机提供了扭矩和速度之间的折衷方案,使其既适用于大多数直线型打印机等较重的设置,也适用于打印速度较快的CoreXY型打印机。
2、丝杠
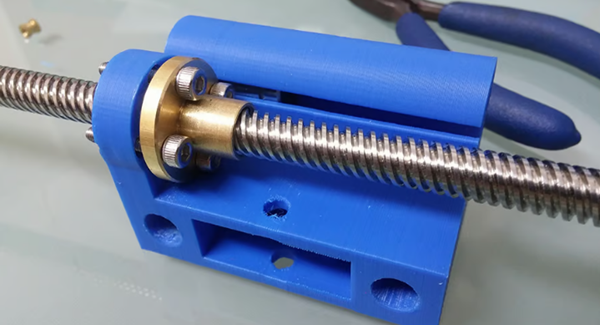
导螺杆是另一种重要的机械装置,它是一种专门用于将旋转运动转化为线性运动的机械部件。虽然有不同种类的导螺杆,但最常见的是梯形(ACME)导螺杆。
这些导杆通过弹性联轴器与步进电机相连,允许轴的末端有一定的移动量,从而避免轴承和电机本身的应力和磨损。这种设置通常用于3D打印机沿Z轴的垂直运动。
使用导螺杆进行线性运动的最大优势可能是其强大的推力和自锁能力,这意味着如果打印机意外断电,它们(通常)不会移动。这也是它们常用于移动构建平台的原因之一。不过,X轴或Y轴很少使用导螺杆,主要是因为它们容易产生严重的反向间隙,导致位置不精确,而且速度很慢。
3、正时皮带

皮带轮组件主要用于3D打印机中的X轴和Y轴运动(来源:All3DP)
同步带是一种"齿形"橡胶带,在两个部件(通常是电机和皮带轮)之间传递旋转运动。一旦皮带上安装了滑块,就可以实现线性运动,而电机则负责驱动整个皮带-滑轮组件。
这些皮带根据其齿形进行识别。3D打印常用的同步带使用"Poly Chain GT2"齿形,通常简称为"GT2"。电机皮带轮必须具有与同步带相同的齿形,装配耦合才能正常工作。
在FDM打印机中,该系统通常用于为X轴和Y轴提供运动,因此皮带的正确张紧至关重要。这就是为什么许多3D打印机都内置了调节皮带张力的装置。
编译整理:ALL3DP









")