
























作品详情
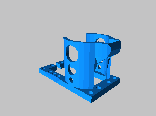
这是一款手柄可自由调节的机器爪模型。
这款机器爪的手柄可以在它夹起物体时根据物体的形状和形式做适当调整。
打印时用普通的PLA材料,无需支撑,当打印后面的支撑梁时你要给打印机减速。
将所有的组件打印出来后,仔细按照图示组装。
| 编号 | 文件名 | 下载次数 | 文件类型 | 文件大小 | 操作 | |
 |
1 | 10 | stl | 0.36M | 下载 打印 | |
 |
2 | 9 | stl | 0.02M | 下载 打印 | |
 |
3 | 9 | stl | 0.26M | 下载 打印 | |
 |
4 | 9 | stl | 0.02M | 下载 打印 | |
 |
5 | 9 | stl | 0.07M | 下载 打印 | |
 |
6 | 9 | stl | 0.18M | 下载 打印 | |
 |
7 | 9 | stl | 0.26M | 下载 打印 | |
 |
8 | 9 | stl | 0.26M | 下载 打印 | |
 |
9 | 0 | stl | 0.36M | 下载 打印 | |
 |
10 | 0 | stl | 0.02M | 下载 打印 | |
 |
11 | 0 | stl | 0.26M | 下载 打印 | |
 |
12 | 0 | stl | 0.02M | 下载 打印 | |
 |
13 | 0 | stl | 0.07M | 下载 打印 | |
 |
14 | 0 | stl | 0.18M | 下载 打印 | |
 |
15 | 0 | stl | 0.26M | 下载 打印 | |
 |
16 | 0 | stl | 0.26M | 下载 打印 | |
 |
17 | 0 | stl | 0.02M | 下载 打印 |
共
17个文件




