魔猴账号登录
短信快捷登录
账号密码登录
换一张
自动登录
其他方式登录
注册账户 >>
注册账户下单得积分,享受会员专属折扣,也可兑换丰富礼品
在线报价
开始3D打印
开始CNC机加
3D扫描一口价
开始激光切割
开始3D建模
开始注塑成型
有3D文件
3D打印即时报价
CNC即时报价
CNC即时报价
激光切割即时报价
激光切割即时报价
有实物需要扫描
3D扫描一口价
没有3D文件
3D设计即时报价
行业案例
视频案例
行业案例
开始报价制作
后处理工艺
支持的材料
打印必读
展示模型
工业设计
原型手板
艺术雕塑
建筑沙盘
动漫手办
医疗生物
汽车制造
批量制造
影视道具
客户说
资源
资讯
3d打印介绍
CNC介绍
激光切割介绍
注塑成型介绍
问答
知识堂
优惠
会员优惠
积分换购
魔猴支付
云平台软件
3D工具
3D模型库
登录
×
扫一扫微信咨询
立即打印
010-53652212
(工作日)
152 0110 5575
152 1011 0562
(周末)
请留下需求
QQ咨询
请输入您的电话
请简单描述您的需求
请您补充完整信息
免费接通
拨打电话:010-53652212 9:00-23:00(含周末)
qq
3D
作品详情
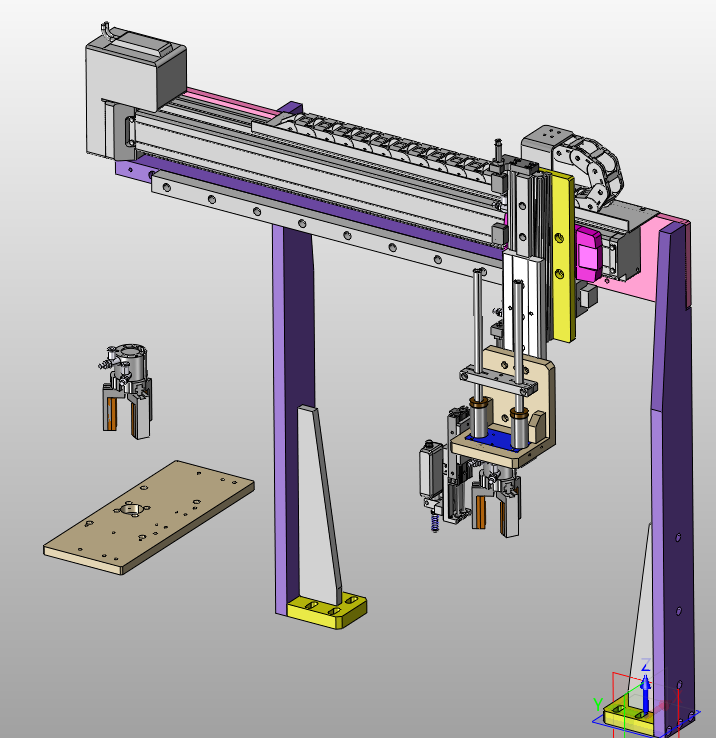
XZ机械手插入机构:X向采用伺服系统定位,抓取零件采用三爪气缸抓取,Z向采用气缸压入,在设备插入到位后,使用位移传感器检测到位进度,满足检测。
下载模型
XZ机械手插入机构
无敌真皮皮
上传于 2023-08-02
本模型来自于用户自传,版权属于上传用户,如有异议,请举报删除!
喜欢
0
评论
0
浏览
208
下载
0
标签
XZ
机械手
插入
机构
该作者的其他作品
作品分享
新浪微博
QQ空间
腾讯微博
人人网
开心网
豆瓣网