科学家使用3D打印技术开发低成本的“象鼻”机器人
魔猴君 行业资讯 1100天前
来自蒂宾根大学和格拉茨科技大学的一组研究人员用3D打印了能够模仿大象象鼻运动的机械臂。FDM打印的机器人在尖端配备了抓爪,可以使用机器学习技术来漫游并适应新任务,例如捡起大理石并将它们放在讲台上。作为一种低成本的概念验证开发,该设计最终可以继续用于工业生产线上,在工业生产线上它可以执行各种灵活的操作,例如运输汽车零件或组装电子设备。
该研究的合著者塞巴斯蒂安·奥特(Sebastian Otte)博士对《新科学家》说:“我们的梦想是,我们可以在持续学习的环境中做到这一点,在这种学习环境中,机器人会在没有任何知识的情况下启动,然后尝试达到目标这样就产生了自己的学习示例。”
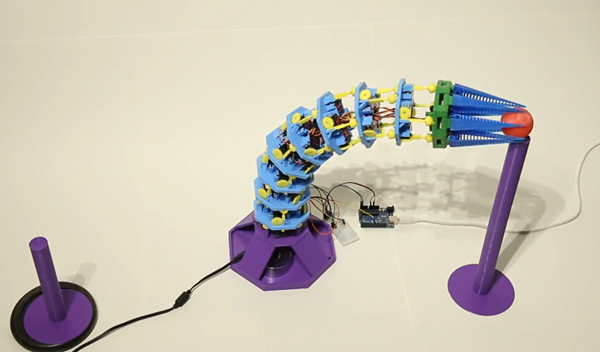
机器人学习如何捡起和放置大理石。图片来自蒂宾根大学。
工业5.0:象鼻
象鼻是进化史上最好的作品之一。它们具有相等的部分,既灵活又结实,并为大象提供了在动物界不常见的灵巧程度。因此,它们是学术界许多现代仿生项目的灵感来源,气动执行器通常充当人造肌肉纤维以实现弯曲和伸展。
Otte和他的同事选择了模块化设计,该设计基于一组统一的,可堆叠的关节模块,每个模块具有三个自由度(DoF)。当前的设计最多具有这些模块中的十个,但是据报道,使用功能更强大的电机可以使机器人的长度增加一倍。每个部分都装有几个电动机驱动齿轮,这些电动机可同时使模块在两个轴上倾斜多达40°。除了弯曲之外,机器人的躯干还能够加长和缩短–就像真实的东西一样。不幸的是,计算机器人执行器执行复杂操作的逆运动学并不是一件容易的事,对于这么多的自由度来说更是如此。这就是人工智能的用武之地。
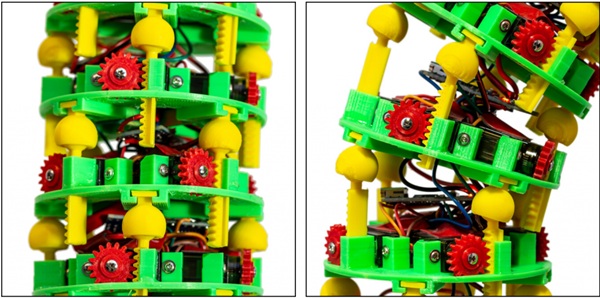
机械臂的可堆叠关节。图片来自蒂宾根大学。
刺激神经网络进行导航
该团队使用所谓的尖刺神经网络(SNN)来控制机器人,这是一种紧密模仿自然大脑过程的人工神经网络。除了合并神经元和突触状态外,SNN在模型中还包括了时间概念。通过观察一组训练运动,SNN能够将电机运动映射到相应的机器人姿态,从而使团队能够“展开”模型,以近毫米的精度进行目标驱动的导航。研究人员写道:“我们不仅证明可以用基本的3D打印设备构造低成本的类似躯干的机械臂,而且还展示了如何使用最新的循环峰值神经网络体系结构来控制它们。”
就未来的研究而言,该团队已经表示有可能将基于雷达的距离传感器并入以实现防撞功能,从而使该设备能够与人类协同工作。另一种方法是将工作转变成类似蛇的机器人,而不是固定的手臂,从而可以“四处寻找”进行搜索和营救行动。

机器人处于完全屈曲状态。图片来自蒂宾根大学。
低成本机器人技术是如何将3D打印应用于解决抽象问题的主要示例。东京明治大学的一组研究人员最近定制了FDM 3D打印机,以制造出低成本的“多合一”制造机器人。 Functgraph能够自动打印并连接自定义工具头,以更改其活动功能,使用户能够抓取,旋转和破坏3D打印对象,从而在单个打印作业中组装复杂的机械系统。
在其他地方,中国天津大学的科学家此前已经3D打印了可自定义的机器人,该机器人能够实时缩放和监视工业设施中的管道。单件式设备具有一系列软弯曲机制和模块化抓手,使其能够灵活地爬升奇形怪状的基础设施。
来源:https://www.3ddayin.net/3Ddayinfangan/40240.html









")